
Absztrakt Az ember környezetét érzékszervein keresztül észleli, helyzetismeretét az érzékszerveit ért ingerek alapján alakítja ki. Az ember minden érzékszerve közül a látására támaszkodik a leginkább. A hétköznapi életben szemünk észleli a helyzetismeret kialakításához szükséges információk döntő többségét. Humans perceive their environment based on the information provided by their sensory organs. Humans rely foremost on their vision in establishing situational awareness. In everyday life, the eyes supply the dominant percentage of information used in understanding and living in our environment. Kulcsszavak:Virtuális valóság, szimuláció, szemléletes információ, érzékszervi információ ~ virtual reality, simulation, perceptual information, sensory information . Szemléletes információ, és annak jelentősége. Az ember környezetét érzékszervein keresztül észleli, helyzetismeretét az érzékszerveit ért ingerek alapján alakítja ki. Az ember minden érzékszerve közül a látására támaszkodik a leginkább. A hétköznapi életben szemünk észleli a helyzetismeret kialakításához szükséges információk döntő többségét. A technika fejlődésével immár lehetővé vált, hogy az érzékszerveinket érő ingereket mesterségesen hozzuk létre, olyan hatást fejtve ki ezáltal az emberi érzékelésre, mintha egy másik - valós vagy kitalált - helyen tartózkodnánk. Ezt a technikát - a virtuális valóságot - növekvő mértékben alkalmazzák mind a polgári, mind a védelmi szférában. Ennek a technológiának rendkívüli erőssége, hogy jól illeszkedik az ember világról alkotott mentális modelljéhez: ott és olyan formában ábrázolja az információt, ahogyan arra az ember a leginkább fogékony. Legyen szó akár tervezésről, kiképzésről vagy kiértékelésről, a helyzetismeret kialakításában páratlan lehetőségeket kínál a virtuális valóság. Ebben a cikkben azt fogom megvizsgálni, hogy valós szemléletes és adatszerű információ darabkákból hogyan jön létre a virtuális valóság. Célom a részinformációk a virtuális térben és időben történő fúziójának, elhelyezésének és összerendezésének, kérdéseit vizsgálni. Részcélokként tűztem ki a közös virtuális térben való elhelyezés problémáinak vizsgálatát és megoldásai terveit, illetve ennek a sajátosságait a GRIPEN projektben. Virtuális valóság előállításának alapjai
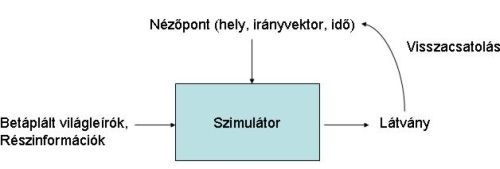
Vizsgáljuk meg egy virtuális valóságot előállító eszköz - egy valóság szimulátor - magas szintű működését.
1.ábra:
A szimulátor alapvetően - egy szoftver vagy egy szoftver hardver együttes - kimeneti és bemeneti interfészekből, vezérlőből és adatkezelő eljárásokból áll. A szimulátor általában csak a keretrendszert definiálja és azokat a képességeket valósítja meg, ami a bemeneti adatokból (díszlet / scenery) képes elvégezni azokat az adatfúziós eljárásokat, amivel előállítható a felhasználó által igényelt látvány vagy látvány együttes. A szimulátorba előre betáplálásra kerülnek a szimulált környezet különböző aspektusai. Ezek a betáplált részinformációk határozzák meg a szimulált környezetet. A felhasználó valamilyen mutató eszközzel definiálja a nézőpontját, illetve a tekintetének irányát, esetleg a kívánt nagyítást. Ezekből a megszerzett és betáplált részinformációk irányított fúziójából jön létre az a látványkép, ami a felhasználó elé tárul. A virtuális tér leírása
3D modell
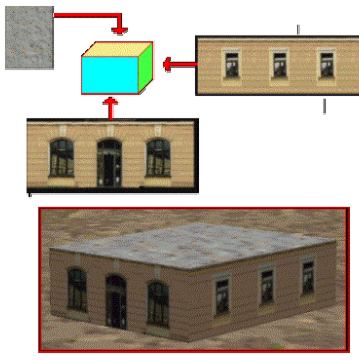
Egy virtuális tér leírásának legteljesebb, leggyakrabban használt módja során, háromdimenziós hálómodellek alkotják az objektumok vázát, a felületekhez, pedig textúrákat - tükröződési tulajdonságokkal bővített képeket - rendelnek. Ez lehetővé teszi, hogy egy 3D renderer - egy háromdimenziós számító / ábrázoló szoftver - a perspektivikus ábrázolás klasszikus szabályai alapján létrehozza az objektum tetszőleges nézőpont szerinti látképét. Egy raytracer - azaz egy nyalábkövető algoritmus - a virtuális térben definiált megvilágítási pontokból követve a virtuális fénysugarak útját hozza létre az árnyék és fényviszonyokat az objektum és környezete felületén, teintetbe véve a textúrákban definiált tükröződési tulajdonságokat is.
Ezzel a 3D képeket elkészítő technológiával részletesen leírható egy virtuális tér, körbejárható objektumokkal, rendkívüli részletgazdagsággal. Ez azonban óriási erőfeszítést igényel a virtuális tér megalkotójának részéről, akinek minden objektumról hálómodellt kell készítenie, és a felületekre textúrákat kell definiálnia. Ez a hálómodel sokszázezer polygont jelent. Ezek vetítése és renderelése olyan számítási feladatot jelent, amely ma ugyan már nem lehetetlen, de jelentősen megdrágítaná a futtatásra alkalmas számítógép árát. Ugyanakkor ez a részletgazdagság gyakran nem is szükséges. Egy repülési szimulációban nem szükséges részletes ábrázolás minden egyes házról és pajtáról, különösen, ha a megoldandó harci feladat nagy magasságban történik. OrtofotókMivel a repülési szimulációkban a repült/szimulált idő nagyrésze közepes, illetve nagymagasságban történik, ezért ezekben a rendszerekben a szimulációs környezet nagyban épül az ortofotókra. Az ortofotó perspektívikus torzulástól mentes (illetve mentesített) légi vagy műhold felvétel. Az ortofotók remekül szimulálják azt a látképet, amit egy repülőben ülő személy látna a földfelszínből, ha a felszín fölött néhányszáz méternél magasabban repülne.
3. ábra:
Ha az ortofotót textúraként egy domborzati hálómodellre vetítjük, úgy nagy részletgazdagságot kapunk a repülési feladatok földfelszín szimulációinak legnagyobb részéhez. Ugyanakkor az ortofotók beszerzése is jelentős költségtényező, valamint tárolásuk is jelentős térhelyet igényel. Egy négyzetkilométer ortofotó felbontástól és tömörítéstől függően néhány megabájtnyi képi információt jelent. Innen könnyen kiszámítható, hogy még egy kissebb ország területének digitális ortofotói is nehezen tárolható és kezelhető mennyiségű adatot jelentenek. Magyarország területe hozzávetőleg 93.000 négyzetkilométer. 1 megabájt per négyzetkilométerrel számolva 93 gigabájtnyi adatot jelent, ami így is 20 hagyományos DVD lemezt jelentene. Kategorizált területekSzerencsére a szimulációs feladat nem teszi szükségessé mindig a környezet ennyire valósághű és pontos ábrázolását. Az ország felszínének jelentős része erdő, tó vagy termőföld, amiket utak, vasutak és folyók, vizek szelnek át, tarkítanak. Felesleges lenne minden négyzetkilométer erdőt vagy szántót fényképszerűen tárolni, ha semmi konkrét látnivaló nincs ott, és a szimuláció felhasználója az első pillantás után úgyis csak legyintene, hogy ez csak egy erdő, semmi több. Éppen ezért a szimulátorok nagyrésze az ilyen területeket, mint kategorizált területeket tartja nyilván. Ilyenkor egy sokszöggel körbeírt területnek egyedi kategória besorolást ad, például fenyőerdő, szántó, lomboserdő, bozót, mező vagy sekély, partmenti víz. E területek felszínének nincsen egyedi fényképszerű tárolása. Megjelenítéskor a kategória tipikus textúra, felszínkép tölti ki csempeszerűen a kategorizált régiót, és a konkrét légifénykép helyett ez kerül megjelenítésre. Ezzel az adatok beszerzésének, tárolásának és megjelenítésének költség a töredékére csökkenthető. Ha a kategorizált területek ügyesen vannak megválasztva, a szimuláció az értékéből, élethűségéből szinte semmit sem veszít.
Autogen objektumok A kategorizált területek életszerűsége tovább növelhető autogen - automatikusan generált - háromdimenziós tereptárgyak elhelyezésével. Az autogen technikánál a kategóriák hivatkoznak tipikus objektumokra, illetve azok előfordulási sűrűségére. Ezek a hivatkozott objektumok a fent ismertetett 3D modellek formájában vannak eltárolva. Ezeket az objektumokat a területen ismert előfordulási sűrüség alapján véletlenszerűen helyezi el a rendszer, természetesen csak akkor, ha ezek a nézőpont felszín feletti magassága alapján indokolt, azaz az objektumok láthatóak lennének. Például egy agrár területen gyakran előforuló tereptárgyak istállók, pajták, szénarakások, vagy gabonasilók. A terület látképnek összeállítasakor a kategória jellegzetes textúra fölé véletlenszerűen helyez el a rendszer ezekből a tipikus háromdimenziós tereptárgyakból, hogy alacsony magasságból szemlélve még élettelibb, jellegzetesebb legyen a táj. Folyók, utak, vasutakAz ország területét utak, vasutak, folyók szelik át. Ezek fontos tájékozódási információt hordoznak a levegőben vagy földön tartózkodóknak. Éppen ezért a folyók, utak és vasutak kiemelt szerephez jutnak a virtuális valóságban. Ezeket az elemeket a szimulátorok jellemzően vektor füzérként, spaghetti modellben tárolják a kategóriára jellemző információkkal együtt. A spaghetti modell jelöli ki a pontos fekvést és elvezetést, és a kategória információk adják meg a szélességet, felületet, sávok számát, amely a pontos látképet eredményezi. Autogen technikával életszerűbbé tehetők ezek a vonalas alakzatok, ha a vektorok mentén jellegzetes járművek mozognak, például folyón hajók, utakon autók és teherautók. A tipikus járműveket, illetve a forgalomsűrűségi adatokat a kategória leírók rögzítik.
Ez a technika mind a kategorizált területekre vetítve, mind pedig az ortofotók fölött jól működik. Az ortofotóval történő összevetítésnél az utak elvezetésénél különösen körültekintőnek kell lenni, hogy a spaghetti modell a fotón látható úttal egybevetüljön. ÖsszképÖsszefoglalva a virtuális tér domborzati modellből, kategorizált területekből, ortofotókból, körbejárható háromdimenziós statikus objektumokból, és háromdimenziós álló vagy mozgó autogen elemekből áll össze. Általánosan elmondható, hogy a szimulációs terület nagyrésze kategorizált területekből és autogen elemekből áll össze, és csak a kiemelt régiók, városok vagy jellegzetes tájegységek, amik tájékozódási vagy végrehajtási pontokként, zónánként fontos szerepet játszanak ortofotó vagy 3D modell szinten.
6. ábra:
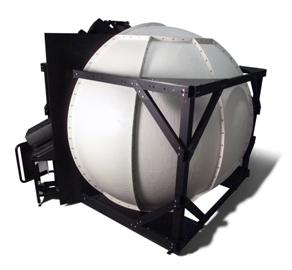
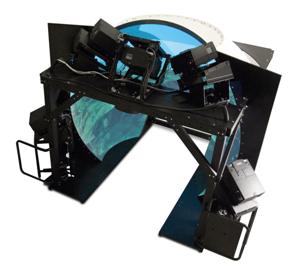
Ezzel a technikával lehet a kívánt egyensúlyt megtalálni a valósághű érzés és részletgazdagság, és a felmerülő fejlesztési, adatbeviteli költségek között. Magyar vonatkozások: GRIPEN Napjainkban egy konkét, aktuális valóság szimulátor betáplálása folyik. A GRIPEN program kapcsán, a repülőgépekhez kapcsolódóan most készül a PETRA (Planning, Evaluation, Training, Rehearsal and Analysis) rendszer, a GRIPEN szimulációs kiképző, feladattervező és kiértékelő rendszerének honosítása. A Petra rendszer egy integrált művelettervező, kiképzési és gyakorló rendszer, ami szorosan kapcsolódik a GRIPEN repülőgépek információs rendszeréhez. A Petra két fő komponense a műveleti támogató rendszer (Mission Support System) és a műveleti kiképző rendszer (Mission Trainer). A műveleti támogató rendszer adja a repülőgép és vezetője számára az időszerű helyzetismereti és műveleti adatokat, valamint feketedobozként rőgzíti a művelet során végrehajtott akciókat. Ezek az információk képezik később a műveleti kiképző rendszerben a kiértékelés, illetve a kiképzés alapját. A műveleti kiképző rendszert Saab Image Generation software hajtja meg, SGU/IRIX vagy PC/Linux platformon. [2] [7] BARCO Seer minidome megjelenítő rendszert alkalmaz [3], ami egy több projektoros rendszer, ahol a képet egy gömbfelületre vetítik. A kivetítő gömb közepén egy repülőgép pilótafülke található kezelőszervekkel, amin keresztül a pilóta irányítani tudja a szimulációt.
A Petra rendszert, illetve a szimulátort a svéd fél készítette. A szimulációs adatbázisa eredetileg nem tartalmazta a Magyar Köztársaság domborzati, helyrajzi és látképi viszonyait. A térképészeti szolgálat, illetve a térképészeti KHT, a rendelkezésre álló domborzati modellek és légifényképek, illetve tematikus térképek alapján készíti el azt a bemenő információ csomagot, ami alapján lehetővé válik a magyar légtérben végzett szimulált repülés, vagy feladattervezés. Petra rendszer három országban működik: Svédországban, Csehországban és Magyarországon. [9] Irodalomjegyzék
Jegyzetek: |




{kind=link}
{kind=link}
{kind=link}
© ZMNE BJKMK 2007.