
Bevezetés Vélhetőleg sokan vagyunk olyanok, akik különböző harcászati (hadászati), hadműveleti és törzsvezetési gyakorlatok keretében heteket, hónapokat töltöttek szobányi méretű térképek megrajzolásával, az aktuális harcászati helyzet térképen történő megjelenítésével. Jól tudjuk, hogy "a térkép sok mindent kibír". Azonban ezeknek a megtervezett és térképre rávezetett helyzeteknek az objektivitása gyakran megkérdőjelezhető. A számítógép elterjedésével és a térinformatika fejlődésével eljutottunk egy következő - magasabb szintre, ahol központi szerepet tölthet be az objektivitás. A térinformatika egy olyan új szemléletváltozás, amelynek lényege a térbeli, térképi numerikus adatok és a hozzá tartozó attribútum adatok egységes tárolási, kezelési, lekérdezési lehetőségét eredményezi a GIS segítségével. Ez egy komplex rendszer digitálisan. A digitális térkép a számítógépes térképészet kialakulásával adva van. Leíró adatbázis pedig nagyon sok van már számítógépen. Olyan adatbázist pedig, ami ezen, komplex kezelést igényelné nem nehéz találni, hiszen ha belegondolunk az adataink túlnyomó része (60-70%) helyhez kötött. Kezdve a klasszikus földhivatalos nyilvántartástól a fejlett repülőgép navigáción keresztül a honvédségnél alkalmazott harcászati szimulációs rendszerekig. Ebben az írásban a térinformatikának csupán egy szűk, de katonai szempontból fontos ágával kívánok foglalkozni. Ez nem más, mint a harcászati szimulátorokban rendelkezésre álló megjelenítési és kiértékelési funkciók. Bemutatom, hogy a jelenlegi programfejlesztési szint milyen nagyrészletességű és hiteles kiértékeléseket tesz lehetővé, ezzel rávezetve a hozzáértő olvasót a rendszer lehetőségeinek jobb megértésére. Ahhoz, hogy a címben megfogalmazott téma kibontásra kerüljön elengedhetetlenül szükséges egy rövid áttekintés MARCUS-H szimuláció rendeltetéséről, alkalmazási lehetőségeiről, az általa végrehajtható főbb szimulációs feladatokról. A katonai szimulációs térinformatikai programfejlesztésekben meghatározó szerepet tölt be az Artifex Kft. A cég 1989 óta végezi a Magyar Honvédséggel szorosan együttműködve és annak megbízásából, a honvédségnél alkalmazásban lévő szimulátorok és ezek szoftvereinek fejlesztését. A MARCUS-H szimulátor ennek a másfél évtizedes együttműködésnek eredményeként jött létre. 1. A MARCUS-H magyar fejlesztésű harcászati szimulátor 1.1. A MARCUS-H általános jellemzése A MARCUS-H CAX szimuláció egy századrészletességű, valósághű szimuláció, amelyben a hadtest/hadosztályparancsnokok és törzseik, továbbá alárendeltjeik tudják gyakorolni a hadműveleti és harcászati tevékenységek előkészítését és végrehajtását. A szimulátor alapvető rendeltetése egy- és kétfokozatú hadtest-hadosztály szintű törzsvezetési CAX gyakorlatok kiszolgálása. A MARCUS-H szimulátor alkalmazásával az alábbi feladatokat lehet megvalósítani:
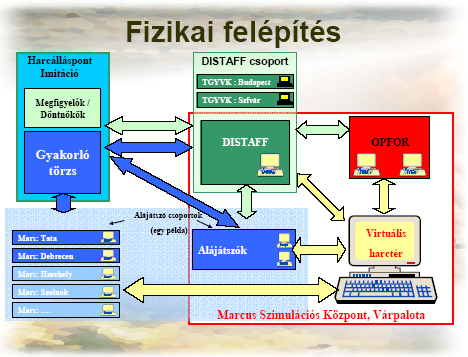
1. ábra Marcus-H fizikai felépítése A szimulátor az objektív modellezéshez tartalmaz:
A szimuláció tartalmazza továbbá:
A feladatkészítés modullal gyakorlatilag megkötések nélkül összeállíthatók a szimulált századszintű elemi kötelékek a MARCUS-D szimulátorban használt, megszokott entitásokból (harc- és szállító járművek, fegyverek, deszantok , katonák, repülő eszközök, stb.). Az így összeállított századszintű elemi kötelékekből (kivételes esetekben egy-egy, vagy kisszámú egyedi eszközből, - harc- és szállító járműből, és/vagy repülő eszközből -) álló tetszőleges szervezeti struktúrát lehet felépíteni mind a saját erők, mind az ellenfél, valamint a szituációban megadott többi résztvevő fél számára. A szimulációs szervezeti felépítés tartalmazza a szervezeti hierarchiát, az alegységek számát, fegyverzetét, készleteit, állományát, állapotát, stb. A feltöltött típusszervezetek és az építőelemek listája felhasználóbarát adatmegadást tesz lehetővé. Mennyiségi korlátként csak a szimulációt futtató számítógépek teljesítménye jelentkezik, ami jelenleg a teljes szituációra (saját fél, szomszédok, tartalékok, ellenfél, további felek erői, egyedi eszközök, stb.) vonatkoztatva maximum 1200 századszintű elemi kötelék. 1.2. Végrehajtható tevékenységek Mozgás, manőver:
Tüzelés:
Lehetőség van a századszintű szimulációs elemekhez kötődő egyes logisztikai tevékenységek "félautomatikus" lefolytatására a modellezésben. Részletes kezelői beavatkozás nélkül ki lehet váltani az összevont századon belül:
Az ellátópontokat megközelítő összevont századok automatikusan képesek
A szimulátor segítségével különböző típusú felderítési feladatok is végrehajthatók félautomatikusan, úgymint:
Egyes műszaki tevékenységek végrehajtódnak kötelék szinten is a kiadott parancsok (kezelői beavatkozások) hatására. Ezen tevékenységek (lásd részletes modellezésű terület hasonló funkciói) a következők:
Egészségügyi ellátás:
Javítás modellezése:
Átalárendelés, átvezénylés, alkalmi harci kötelék (AHK) létrehozása :
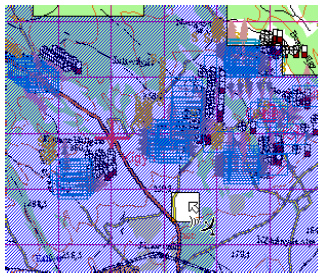
A veszteségpótlást, a személyi/technikai feltöltést is az átalárendelés, átvezénylés funkció felhasználásával lehet megoldani. Az elektronikai hadviselés: Az elektronikai hadviselés szimulációja a híradó, rádió felderítő, bemérő és zavaró eszközök működtetését és azoknak az összfegyvernemi harcra gyakorolt lényeges hatásait modellezi, nem foglalkozik a rádióforgalmazás kérdéseivel. A szimulátor modellezi a légi hadviseléshez kapcsolódó tevékenységeket is, mint a légi eszközök használatának tervezését, a repülők és repülő kötelékek mozgásának kiváltását, tűztevékenységének végrehajtását, deszant ledobást, csomagok és eszközök ledobását és a légi felderítést. Végrehajtás elemzése (After Action Review AAR): A feladat végrehajtás elemzése a felkészítés, illetve az elsajátított tudás ellenőrzésének elengedhetetlen része. A MARCUS-H az AAR előkészítésének és megtartásának minden eleméhez kiterjedt szolgáltatási eszköztárat nyújt. A visszakeresést, elemzést segítő modul felhasználásával a tárolt adatok statisztikák, különböző szempontok szerint kiválogathatóak, megjeleníthetőek és kinyomtathatóak. 2. A MARCUS-H szimuláció egyes térinformatikai megoldásai A speciális igények és követelmények speciális megoldásokat tesznek szükségessé. Ehhez elengedhetetlenül szükséges a saját térinformatikai alkalmazások fejlesztése. A továbbiakban a teljesség igénye nélkül bemutatom azokat a feladatokat, amelyeket a térinformatikai alapokon a MARCUS harcászati szimuláció képes kezelni: 2.1. T erepértékelési funkciók A terepértékelési funkciók segítségével olyan elemzéseket végezhetünk, amelyek eredményeképpen felmérhetjük, hogy az egyes alegységek milyen pozíciókat foglaltak el a terepen (láthatósági elemzések), milyen nehézségekkel találkozhatnak a terep leküzdése során (járhatósági elemzések), s az álcázás szempontjából jól települtek-e stb. 2.1.1 Láthatóság elemzés A láthatóság vizsgálat során információkat szerezhetünk a terep látható és nem látható pontjairól, elősegítve ezzel a tájékozódást. A bemutatásra kerülő funkciók csupán egy töredéke állt rendelkezésre a kezdeti időszakban, de az alkalmazó újabb és újabb igényei és követelményei szükségessé tették ennek a jelentős mennyiségű funkciónak a kifejlesztését. A MARCUS-H az alábbi láthatóság elemzéseket biztosítja: Figyelőpontok megjelölése: A kiértékelés megmutatja, hogy egy adott tereppont a megadott terület mely pontjaiból látszik.Cél láthatósága: A funkció megmutatja, hogy a megadott célobjektumot mely nem baráti objektumok látják. A program megjelöli azokat az egységeket, amik látják a kijelöltet, és azzal "nem baráti" viszonyban vannak. (2 ábra)
2. ábra Cél láthatósága Megfigyelt területek : Lehetőség van több felderítő egység által lefedett, megfigyelhető területek együttes kirajzolására. A program valamennyi kiválasztott megfigyelő szemszögéből megvizsgálja a terepet, és jelöli azokat a helyeket, amiket a megfigyelők közül legalább egy lát. Láthatóság vizsgálat pontból területre: A funkció arra szolgál, hogy eldöntsük, hogy egy adott tereppontból egy kijelölt terület mely pontjai látszanak, és melyek nem. A program kiszámolja a nézőpont és a terület pontjainak összeláthatóságát átszínezéssel jelölve az eredményt. Láthatóság vizsgálat objektumból területre: A funkció arra szolgál, hogy eldöntsük, hogy az adott egység pozíciójából egy kijelölt terület mely pontjai látszanak, és melyek nem. A program kiszámolja az aktív elemi egység helyének és a terület pontjainak összeláthatóságát, átszínezéssel jelölve az eredményt. Láthatóság vizsgálat vonal on : A funkció arra szolgál, hogy egy nézőpont és a belőle kiinduló terepvonal pontjainak összeláthatóságát elemezzük. Pl. Megvizsgálhatjuk, hogy egy katonai egység egy adott irányban meddig lát el. A program megadja a kezdőpont és a terepszakasz többi pontja közötti összeláthatóságot, és kiszínezi a látható szakaszokat és a nem láthatóakat. Legjobb nézőpont keresése területről területre : A funkció segítségével lehetőségünk nyílik arra, hogy egy adott területről (forrásterület) eldöntsük azt, hogy melyik pontja az, ahonnan egy kijelölt célterület a legnagyobb mértékben látszik. A program a forrásterületen belül megjelöli azt a pontot, ahonnan a célterület legnagyobb részben látszik, és ebből a pontból a célterületre elvégez egy láthatósági elemzést. Legjobb nézőpont keresése útvonalról területre : A funkció segítségével lehetőségünk nyílik arra, hogy egy meghatározott útvonalról (forrásterület) eldöntsük azt, hogy melyik pontja az, ahonnan egy kijelölt célterület a legnagyobb mértékben látszik. A program az útvonalon megjelöli azt a pontot, ahonnan a célterület legnagyobb részben látszik, és ebből a pontból a célterületre elvégez egy láthatósági elemzést. Objektum környék láthatósága : Ez a funkció lényegében azt a távolságot adja meg, ameddig a megadott egység legfeljebb elláthat, és, hogy a látótávolságon belül mely pontokat látja a kijelölt egység. A nagyobb körrel jelölt területen belül esnek azok a pontok, ahol a kijelölt egység észlelni tudja a lehetséges egységet, meg tudja határozni a típuscsoportját (pl. gyalogsági harcjármű), a kisebb körrel jelölt területen belül pedig, azonosítani is tudja a típusát (pl. BTR-80). A kék színnel jelölt pontok láthatóak, az adott pontban lévő objektumok észlelhetőek, a pirosak nem a kijelölt egység számára. (3 ábra)
3. ábra Objektum környék láthatósága
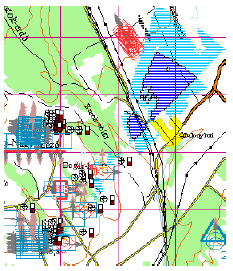
Horizontális megfigyeléssel szembeni rejtő tulajdonságok : A funkció egy adott területet értékel aszerint, hogy a domborzat, ill. a terepen elhelyezkedő tereptárgyak mennyire biztosítanak rejtést az egységek számára, az ellenséges erőkkel szemben. A program minősíti, majd a térképen színekkel jelöli a terület pontjait, aszerint, hogy a rejtés megfelelő, vagy gyenge. 2.1.2. J árhatóság vizsgálat A járhatóság, az élőerő és a technikai eszközök terepen való mozgásának lehetősége, melynek vizsgálata különösen fontos az erdős, hegyes nehezen járható részeken éppúgy, mint az utakon. Hasonlóan a láthatósági funkciókhoz itt is új igények fogalmazódnak meg és ezek bővítése, fejlesztése folyamatosan zajlik. A MARCUS-H az alábbi járhatóság elemzéseket biztosítja: Járhatóság vizsgálat megadott útvonalon : A funkció segítségével megvizsgálhatjuk, hogy egy létező jármű vagy kötelék, ill. egy adott típusú jármű egy megadott útvonal mely részein képes haladni és melyeken nem. A program elvégzi a járhatósági elemzést és az útvonal járható szakaszait kékre, a járhatatlanokat pirosra színezi ki. (4 ábra)
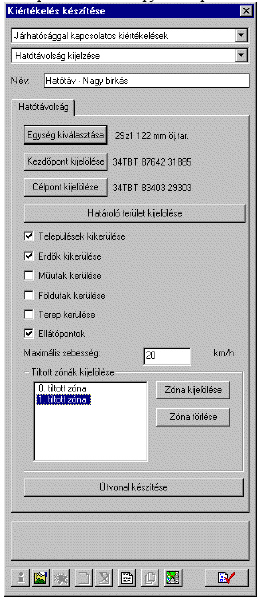
4. ábra Járhatóság vizsgálat megadott útvonalon Járhatóság vizsgálat megadott területen: A funkció segítségével megvizsgálhatjuk, hogy egy létező jármű vagy kötelék, ill. egy adott típusú jármű, egy kijelölt terület mely részein képes haladni és melyeken nem. A program elvégzi a járhatósági elemzést és a terület járható és járhatatlan pontjait kiszínezi. Járhatóság kiértékelésénél a program figyelembe veszi egyrészt a hidak teherbírását, másrészt a járművek gázlóképességét és árok áthidaló képességét! Hatótávolság kijelzése: A csapatok, egységek mozgatásának tervezése során nagyszámú körülményt kell figyelembe venni a legcélszerűbb útvonal kiválasztásához, úgymint: technikai eszközök képességei, terepakadályok, műszaki akadályok, elkerülendő területek, stb. A kiértékelés, automatikus útkereséssel segíti a felhasználót egy összetett szempontrendszer alapján az optimális manőverezési útvonal kiválasztásában. (5 ábra)
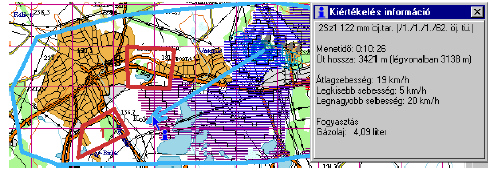
Az összes szükséges adat megadása után a program kékkel jelöli azt a területet, amerre a kiválasztott célpont elérhető. Számos információt megtudhatunk az adott pozícióról, és az eszközről. (6 ábra)
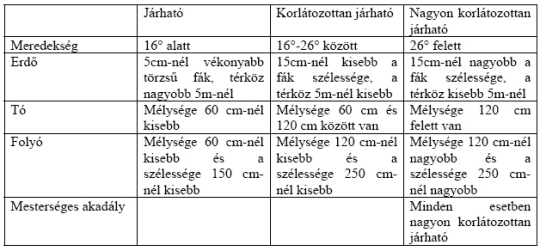
6. ábra Elérhető célok megjelenítése CCM térkép : A CCM térkép, fontos szereppel bír a feladattervezés során, hiszen az összes fegyvernem járműveinek szempontjából, a feladat majdani végrehajtásában a terep járhatósága kiemelt jelentőségű. A terepjárhatóság tematikájának létrehozása során a következő fő tényezőket veszik figyelembe:
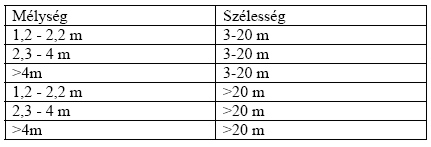
A terület meghatározása után, dönthetünk, hogy a terepjárhatóság meghatározásakor mely tényezőket (talaj, lejtőszög, folyók, települések, domborzati akadályok) vegye figyelembe a program. Miután minden szükséges tényezőt megadtunk, a program végrehajtja kiértékelést:
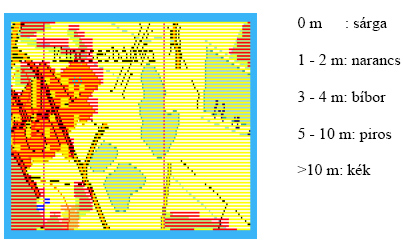
1. táblázat Folyók kategorizálása Talajjárhatóság : A számvetéseknél az eddig figyelembe vett tényezőkön túl, lényeges befolyásoló tényező a talajtípus. Esős időben, felázott talajon növekszik a menetek, manőverek végrehajtási ideje, nő az üzemanyag fogyasztás, és a gépek meghibásodási valószínűsége. A talajtípus nagymértékben befolyásolja a műszaki munkák végrehajthatóságát is. A járművek mozgását alapvetően meghatározzák az egyes talajtípusok hidrológiai viszonyai. Ha a jármű alatt a talaj nedves, vizes, sáros, akkor a járhatósági viszonyai romlanak. Ha a talaj száraz, akkor egy határértékig javulnak a járhatósági viszonyok, majd egyes speciális körülmények között, bizonyos talajok ismét nehezen járhatóvá vállnak. Számít, hogy milyen hőmérsékleti tendenciák, illetve csapadékossági intenzitásokkal jellemezhető az adott terület. Egy adott területre elvégzett talaj járhatósági kiértékelés, az egyes vizsgálandó felületeken (a talaj fizikai jellemzői, és az időjárási viszonyok függvényében) a következő eredményeket szolgáltathatja:
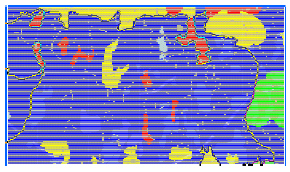
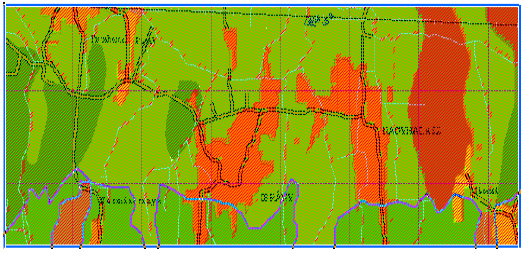
A kiértékelés egy könnyűpáncélos jármű járhatósági viszonyait jeleníti meg. (7 ábra)
7. ábra Terület járhatóság megjelenítése Az egyes járhatósági jellemzők:
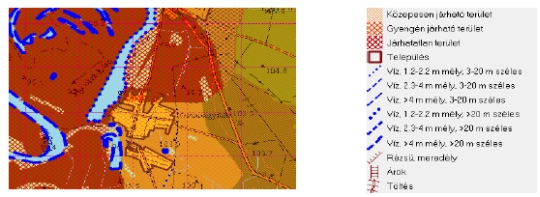
Járhatósági térkép : A terepjárhatósági térképek alkalmasak járható irányok meghatározására és a különféle természetes akadály (folyó, domborzati akadályok) leküzdhetőségének vizsgálatára. A terep járhatósága számtalan közlekedési eszköz vizsgálatára alkalmazható. A kiértékelés eredményeként, a program a térképi területen berajzolja a járhatósági térképet a megadott opcióknak megfelelően. (8 ábra)
8. ábra Járhatósági térkép 2.2. TüzelőállásA program távolság alapján határozza meg, hogy egy tűzalegység látja-e a célt, vagy sem. Amely üteg, ezen távolságon belül van eléri a célt, a többi nem. A kiértékelés eredményeként a térképen láthatjuk, hogy a beállított alegységek lőhetik a célt. (9 ábra)
9. ábra Pusztítható célok megjelenítése
Tüzér tüzelési szektorok: A funkció a megadott tüzelőállások tüzelési szektorát jelöli meg. A térképen láthatjuk, hogy a beállított tüzelőállások tüzelési szektora mekkora, a megosztott irány, maximális lőtávolság, a minimális lőtávolság, ill. a tüzelési irány max. eltérés függvényében. (10 ábra)
10. ábra Tüzelési szektor megjelenítése 2.3. Fedettség vizsgálat A funkció segítségével megvizsgálhatjuk, hogy egy terület pontjai milyen fedettséget adnak, azaz az ott tartózkodó egységek részére milyen természetes álcázást nyújtanak. A fedettséget a terep egy adott pontján azzal jellemezzük, hogy ott milyen magas, takarásra alkalmas vegetáció, tereptárgy stb. található.(11 ábra)
11. ábra Fedettség vizsgálat 2.4. RadarA radar közvetlen rálátással bíró járműveket tud felderíteni. A MARCUS-H az alábbi radar elemzéseket biztosítja: Radar látvány : A radar látvány, megadott pozícióban lévő radar maximális felderítési távolságát adja meg, adott magasságra vonatkozóan. Az adatok megadása után, a kiértékelés készítésekor a térképen látható lesz, hogy a radar a megadott magasságban mely területeket látja. (12 ábra)
12. ábra Radar látvány Radar térkép: A kiválasztott radarok maximális felderítési távolságán belül megmutatja a látható területeket, adott magasságra vonatkozóan. Radar metszet : Megjelöli egy útvonallal megadott függőleges metszet területén, mely pontokat látja legalább egy radar a kiválasztottak közül. 2.5. T üzeléssel kapcsolatos kiértékelésekA közvetlen irányzású fegyverek tűzrendszerének ellenőrzését el lehet végezni adott/feltételezett célokra, illetve területekre. A MARCUS-H az alábbi tüzeléssel kapcsolatos elemzéseket biztosítja: Tűzrendszer elemzése : A közvetlen irányzású fegyverek tűzrendszerének ellenőrzését el lehet végezni adott/feltételezett célokra, illetve területekre. A program elkészíti a tűzrendszer értékelését, az eszközök adatainak megfelelően (lőtávolság, páncélátütő képesség, stb.), megjeleníti a térképen azokat a területeket, ahol a kijelölt eszközök a várható ellenséget pusztítani tudják. (13 ábra)
13. ábra Pusztítható célok megjelenítése Tűz elleni védelem : A tűz elleni védelem kiértékelés megmutatja, hogy megosztott irányzású tűz , - választott tüzelési eszközre nézve -, és a kézifegyverekből leadott tűz esetén, melyek azok a területek, amelyek védelmet nyújtanak:
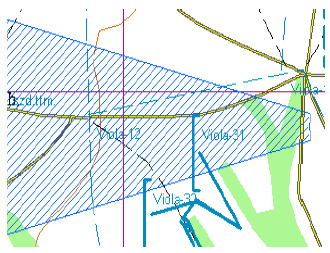
2.6. RepülőkA program segítséget ad a repülők, helikopterek települési helyének kiválasztásához. A MARCUS-H az alábbi elemzéseket biztosítja: Fedélzeti levegő-levegő rakéta alkalmazási területe : A kiértékelés informál arról, hogy adott magasságon, adott pozícióból hová lehet lőni a rakétával. A kiértékelés eredményeként látható lesz a térképen az a terület, ahol a levegő-levegő rakéta alkalmazható. Fedélzeti levegő-föld rakéta alkalmazási területe : Megmutatja a program, hogy adott magasságon, adott pozícióból hová lehet lőni. Repülők harci hatósugarának kijelzése : Harcászati hatósugár az a legnagyobb távolság, amelyre az egyes repülőgép vagy helikopter egy teljes tüzelőanyag feltöltéssel az adott feltételek vagy viszonyok között, közbenső leszállás nélkül képes elrepülni úgy, hogy a leszállást a kiindulóponton (repülők repülőtéren) hajtja végre. A program is lehetőséget ad a repülő eszközök (repülők, helikopterek) harcászati hatósugarának kiértékelésére, számos tényező figyelembevételével, úgymint repülési profil (sebesség, magasság), utántöltés, póttartály, esetleges köztes repülőtér. Helikopter leszállóhely : A helikopterek elvileg "bárhol" le tudnak szállni a terepen, de akadnak tényezők, amelyek ezt meggátolhatják. A funkció segítségével megvizsgálhatjuk, hogy egy létező jármű, élőerő vagy egyszerűsített kötelék, ill. egy adott típusú jármű, egy kijelölt terület mely részein képes leszállni és melyeken nem. A leszállást befolyásoló tereptárgyak: erdők, települések, vizek, távvezetékek Egyéb, leszállást gátló tényezők: Leszállóhely talajnyomása, ha a talajnyomás kisebb, mint az adott helikopter fajlagos talajnyomása; Látótávolság, ha 800m-nél kisebb; Felhőalap, ha 300 m alatt van; Szélsebesség, ha nagyobb, mint a helikopter maximális szélsebessége; Pilóta kiképzettsége (1., 2., 3. osztályú vagy aranykoszorús 1. osztályú) A kiértékelés eredményeként láthatóvá válik zölddel, hogy mely terület alkalmas helikopter leszállóhelynek, és pirossal, melyek alkalmatlanok. (14 ábra)
14. ábra Helikopter leszállásra alkalmas területek megjelenítése
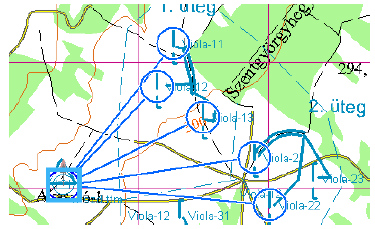
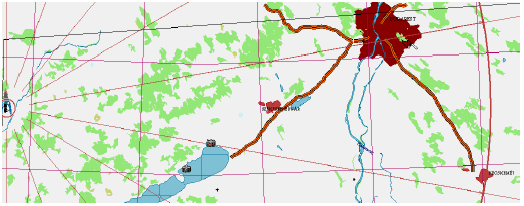
Vadászgépek elérési lehetőségei : A program biztosítja a vadászrepülők települési helyeinek, és elérési lehetőségeinek (lehetséges harcbavetési terepszakaszainak) megjelenítését a térképen, különböző készenléti fokoknak megfelelően. A fenti lehetőségek meghatározásánál figyelembe veszi a program a különböző függesztési változatokat, (póttartállyal, vagy nélküle) és profilokat is. A 15 ábrán látható, hogy kis piros kör jelzi a vadászgépek felszállási helyét , míg a nagy kör a megtehető távolságot .
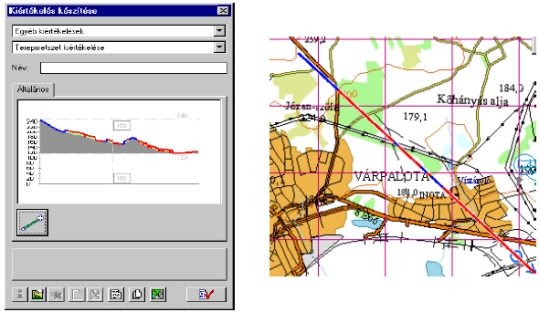
15. ábra Vadászgépek elérési lehetőségeinek megjelenítése Vadászgépek őrjáratozási lehetőségei : A program biztosítja a vadászrepülők őrjáratozási lehetőségeinek megjelenítését a térképen, és táblázatos formában. 2.7. Légvédelmi rakéták A program segítséget ad a légvédelmi rakétaalegységek települési helyének kiválasztásához. A MARCUS-H az alábbi elemzéseket biztosítja: Légvédelmi rakéta megsemmisítési zóna térkép : Megmutatja, hogy hová tudnak lőni a légvédelmi rakéták, hol található együttes megsemmisítési zónájuk. Légvédelmi rakéta megsemmisítési zónakép metszet : Megmutatja egy útvonallal megadott függőleges metszet területén, hová képesek lőni a kijelölt egységek, adott magassági határok között. 2.8. Egyéb kiértékelésekFordulóidő számítás : Felrajzolt útvonal(ak)ról megtudhatjuk, hogy mennyi időt vesz igénybe, ha a teljes hosszukat oda-vissza bejárjuk. Az útvonal azon szakaszait, ahol az egység nem képes mozogni a térképen, azonosíthatjuk. Terepmetszet magasságokkal : A Magasságmérés a terep domborzati és láthatósági viszonyainak megjelenítését biztosítja. A funkció a térkép bármely két pontja között készít egy metszeti ábrát. A program kiszámolja az egység és a terepszakasz pontja közötti láthatóságot, és a látható pontokat kékkel, míg a nem láthatóakat pirossal jelöli ki. A pontok közötti metszeti ábrán pontosan méterben megadva látszik a terepszakasz tengerszint feletti magassága. Jól szemlélteti a vastag, piros és kék vonal a terepszakasz látható és nem látható részeit is. Ha a metszeti ábra fölött húzzuk az egeret, akkor mutatja az aktuális metszetben a magasságot, a térképen pedig a hozzá tartozó pozíciót egy kis körrel, abban az esetben, ha kattintunk a metszeti ábra tetszőleges pontján, azt a szimuláció megmutatja a térképen. (16 ábra)
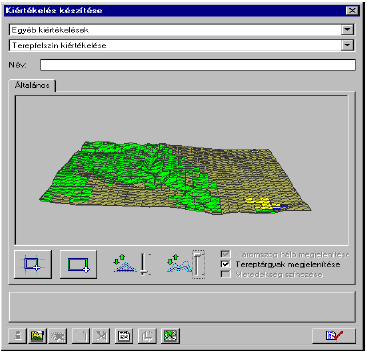
16. ábra Magassági adatok megjelenítése Terepfelszín kiértékelés: A funkció segítségével lehetőség van arra, hogy egy adott területen megállapítsuk, hogy mely részek alkalmasak leginkább lőállásnak. Segítséget nyújt a menetvonal megválasztásában. (17 ábra) A terepfelszín képe forgatható is, ill. nagyíthatjuk és kicsinyíthetjük a képet.
17. ábra Terepfelszín megjelenítése Szintvonal generálás : A funkció elkészíti a magassági vonalakat, 10 méterenként alszintvonalként, 50 méterenként főszintvonalként. Az alszintvonalak 1:25000, vagy annál kisebb nagyításban látszanak. A kadályvázlat: Az akadályvázlat tulajdonképpen azon területek megjelölése, melyek valamilyen okból kifolyólag járhatatlanok, vagy nehezen járhatók közepes harcjármű számára. A járhatóságot korlátozhatja:
A kiértékelés eredménye az aktuális vázlatra létrehozott korlátozottan vagy nagyon korlátozottan járható terület méretarányos jelek. A jelek megjelenése változik a korlátozás mértékétől és a korlátozás típusától (okától). (2.táblázat)
2. táblázat Egyes akadályok járhatóságot befolyásoló hatása Áteresztő képesség vizsgálat : A program azt vizsgálja, hogy két terepakadály között milyen, - általunk választott - alegységszintből mennyi tud szétbontakozva elmenni. A vizsgálat a század, zászlóalj, ezred, és dandár kötelékekre terjed ki. Az áteresztő képesség vizsgálat a korábban létrehozott korlátozottan járható területek alapján lehetséges. A létező (és kijelölt) mozgási folyosók kötelékszint és kötelék darabszám áteresztő képességét mutatja a program. A vizsgálat az aktív vázlaton történik. Az eredményből megtudhatjuk, hogy a megadott méretű kötelékből mennyi tud egyszerre mozogni az egyes mozgási folyosókon. Felszíni alakzatok vázlat : Lehetőség van kiválasztott tereptárgyak (árok, egyoldalú töltés, kétoldalú töltés, lejtő, meredély, bevágás egyoldalú, bevágás kétoldalú) körvonalait felmásolni bármelyik vázlatra. Vegetáció vázlat : A funkció egy választott vázlatra másolja az összes növényzetet, ami az alábbiakat foglalja magába: Mocsár, Szőlő, Vegyes erdő, Gyümölcsös, Lombhullató erdő, Örökzöld erdő Természetvédelmi vázlat : A természetvédelmi vázlat tartalmazza, mindazokat a tervező által készített PAM térképeket (védett területekről), amelyekre a későbbiekben a feladattervezés során szüksége lehet. A PAM térképek szempontjából azokat a területeket nevezzük védettnek, amelyeken a katonai gyakorlatok, kiképzési tevékenységek és mozgások korlátozva vannak. A tematikus tartalomra, a barna szín jellemző. Területi színezésben általában 3 fokozat különböztethető meg, melyek közül a legsötétebb színnel azokat a területeket jelölik, ahol a személyi állomány és a technikai felszerelések elhelyezése tilos. A védett területek a törvény által rögzített határok közötti területek, melyek az alábbi három kategóriába vannak sorolva: 1. kategória: Korlátozott katonai gyakorlati tevékenységek. Kulturális értékek vázlat : A program a kiértékelés során összegyűjti a kulturális értékeket, ezeknek a megjelenített változata, a kulturális értékek vázlat. Összegzés: A felvázolt kiértékelések jelentős részét pillanatnyilag is tartalmazza a MARCUS-H szimulátor programrendszere. Bizonyos elemei a közeljövőben kerülnek installálásra. Az alkalmazói igények változásának függvényében szükségszerű a rendszer folyamatos karbantartása és a program szolgáltatásainak bővítése. Ennek érdekében a térinformatikai fejlesztések szünetmentesen zajlanak és biztosítanak egyre több megoldást a szimuláció teljes körű megvalósításához. Bár a szimulátor eredetileg az alegység, egység és magasabb egység törzseinek harcászati gyakoroltatására lett létrehozva, a digitalizált térképnek, magának a hadszíntérnek ilyen mélységű ismerete, az elemzések időben történő, mindenre kiterjedő és teljes körű végrehajtása nagyságrendekkel megnöveli egy megvívandó harc eredményességének esélyét. Ugyanakkor fontosnak tartom kiemelni, hogy a rendszer sokrétű szolgáltatása lehetővé teszi kísérleti harcászati szituációk létrehozását és ezek objektív mutatók közötti lejátszását a dinamikában. Ezeknek a gyakorlásoknak, kísérleteknek kiértékelésével, elemzésével fejleszthetők, finomíthatóak és módosíthatóak a ma alkalmazott harcászati-hadászati elvek, ami önmagában is felmérhetetlen előnyt biztosít a szakemberek részére. Irodalomjegyzék: 1. MARCUS-H harcászati szimulátor felhasználói kézikönyv ( Artifex Kft. 2006) 2. Szabó Tamás mk alez. "A MARCUS-H harcászati szimulátor alkalmazása a Magyar Honvédségnél".- Tanulmány (2003) 3. Dr. Sárközy Ferenc: "Térinformatika" GIS figyelő http://gisfigyelo.geocentrum.hu/sarkozy_terinfo/13 4. Dr. Remetey F. Gábor - Dr. Fekete János - Dr. Márk us Béla - Dr. Mihály Szabolcs - Dr. Szabó Szilárd "A térinformatika és alkalmazásai" (1993) -Tanulmány |
© ZMNE BJKMK 2006.